


















































































































































新闻中心
NEWS
在当今的激光雷达技术领域,精准的目标距离校准对于激光雷达准确判断周围障碍物及其运动轨迹至关重要。其中,激光雷达反光板算法扮演着关键角色。

在激光雷达的工作进程中,首要任务是从原始数据里精准地提取高反特征点。此过程依据雷达规格书所给出的不同材料强度信息,设定恰当的阈值来达成。不过,更为优化的做法是依据距离的变动动态设定不同的阈值。例如,当目标距离较近时,可适度提高阈值以削减干扰;当目标距离较远时,降低阈值以确保能够检测到微弱的高反信号。这种基于距离的阈值设定方式,能够更高效地从复杂的原始数据中筛选出真正具备高反射特性的点,为后续的处理提供精准的数据基础。
在提取到高反点之后,接下来需要对反光板及反光柱进行聚类处理。聚类的依据是高反点是否连续,同时充分结合距离以及雷达的角度分辨率等要素。通过精确计算,针对不同尺寸的反光板或反光柱确定合适的点数,将那些不符合要求的点予以剔除。这样做的目的在于确保聚类结果的准确性和可靠性,避免因噪声点或错误点的干扰而致使对反光板及反光柱的误判。例如,对于较小尺寸的反光柱,其所需的连续高反点数相对较少;而对于较大尺寸的反光板,则需要更多的连续高反点数来进行准确聚类。
经过聚类处理后,便能够得到反光板的局部地图。通过将反光板的局部地图与自动导引车(AGV)的坐标相结合,能够获取全局坐标。然后,利用全局坐标与全局地图进行匹配,从而反算出AGV的真实坐标。而AGV的真实坐标又可以进一步用于计算新加反光板的全局坐标。这种基于反光板地图的定位方式,为AGV在复杂环境中的精确导航提供了有力支撑。例如,在工业生产车间中,AGV可以通过识别反光板的位置来准确确定自身的位置和行驶方向,从而实现高效的物料搬运和生产作业。
在实际的建图过程中,会遭遇一些问题。例如,在算法测试时发现,如果一边控制车行驶,一边程序自动建图,可能会在真实的柱子周围出现多余的点。经分析,这是由于累积误差所引发的。为了解决这一问题,需要像slam算法中那样,进行回环优化。回环优化能够有效地消除累积误差,提高建图的准确性和可靠性。目前,暂时采用手动加点的方式,即在车辆行驶到一个特定位置后,通过界面点击添加新点,将扫到的反光柱记录下来。这种手动加点的方式虽然在一定程度上增加了操作的复杂性,但在当前技术条件下,能够有效地保证建图的质量。
为了评估激光雷达反光板算法的定位精度,需要开展定位精度测试。通常采用的方法是将激光追踪仪测得的位移与反光柱定位的位移进行比较。同时,通过添加反光柱坐标的累计求评价功能,能够更全面地评估定位精度。此外,在实际应用中还会碰到一些其他具体问题,例如定位精度不统一问题。在导航过程中,由于轮廓导航的精度和反光柱板的精度并不在一个水平上,因此在获得观测的切换点处需要使用滤波器进行平滑过渡,以避免下游的规划控制模块失调。另外,在项目策略方面,除了反光贴反光板以外,还需要引入几何特征板做定位。这些几何特征板一般在现场是预埋的,不能随意调整。在场景比较大的时候,激光雷达的倾角也需要进行估计。
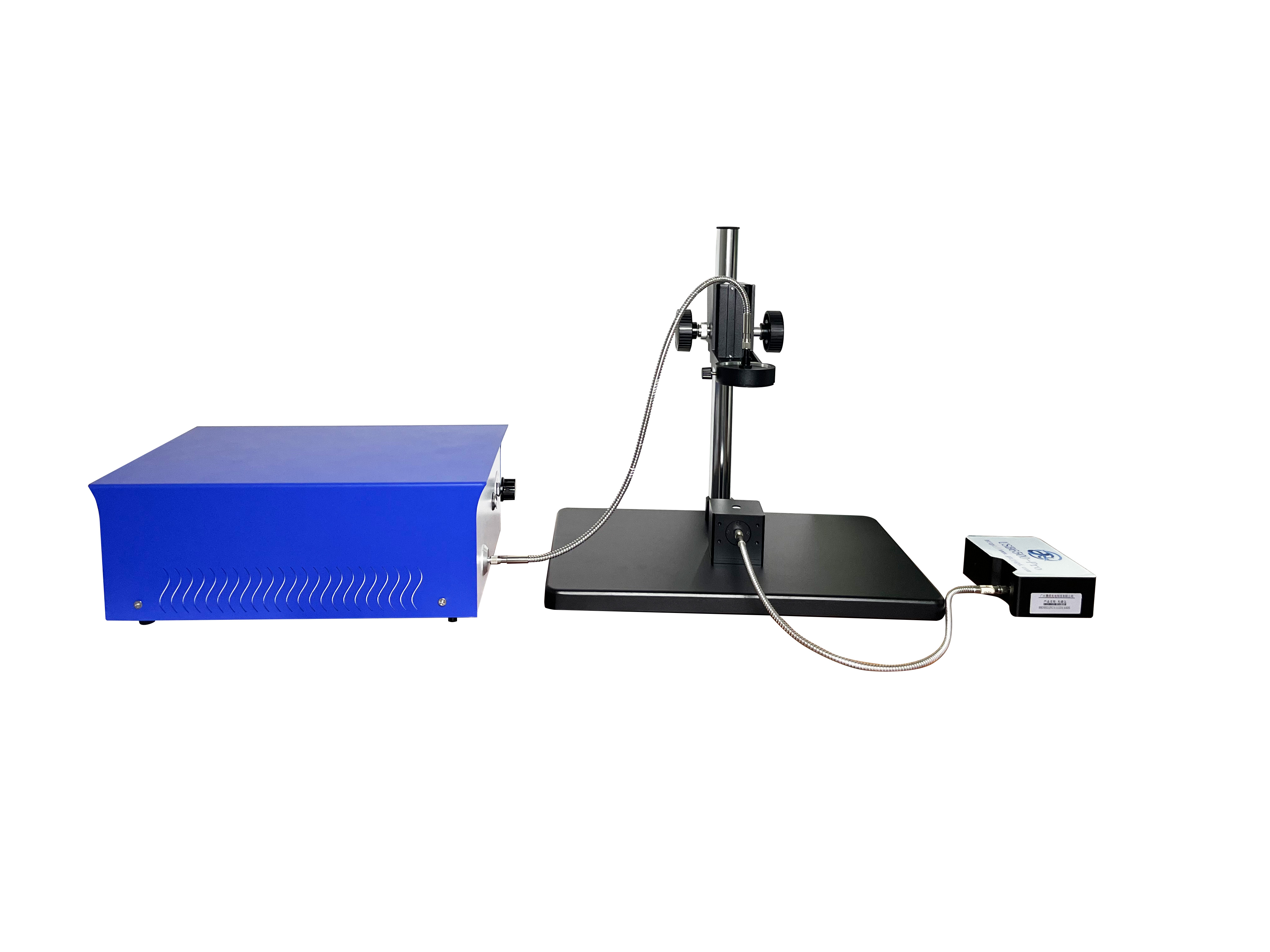
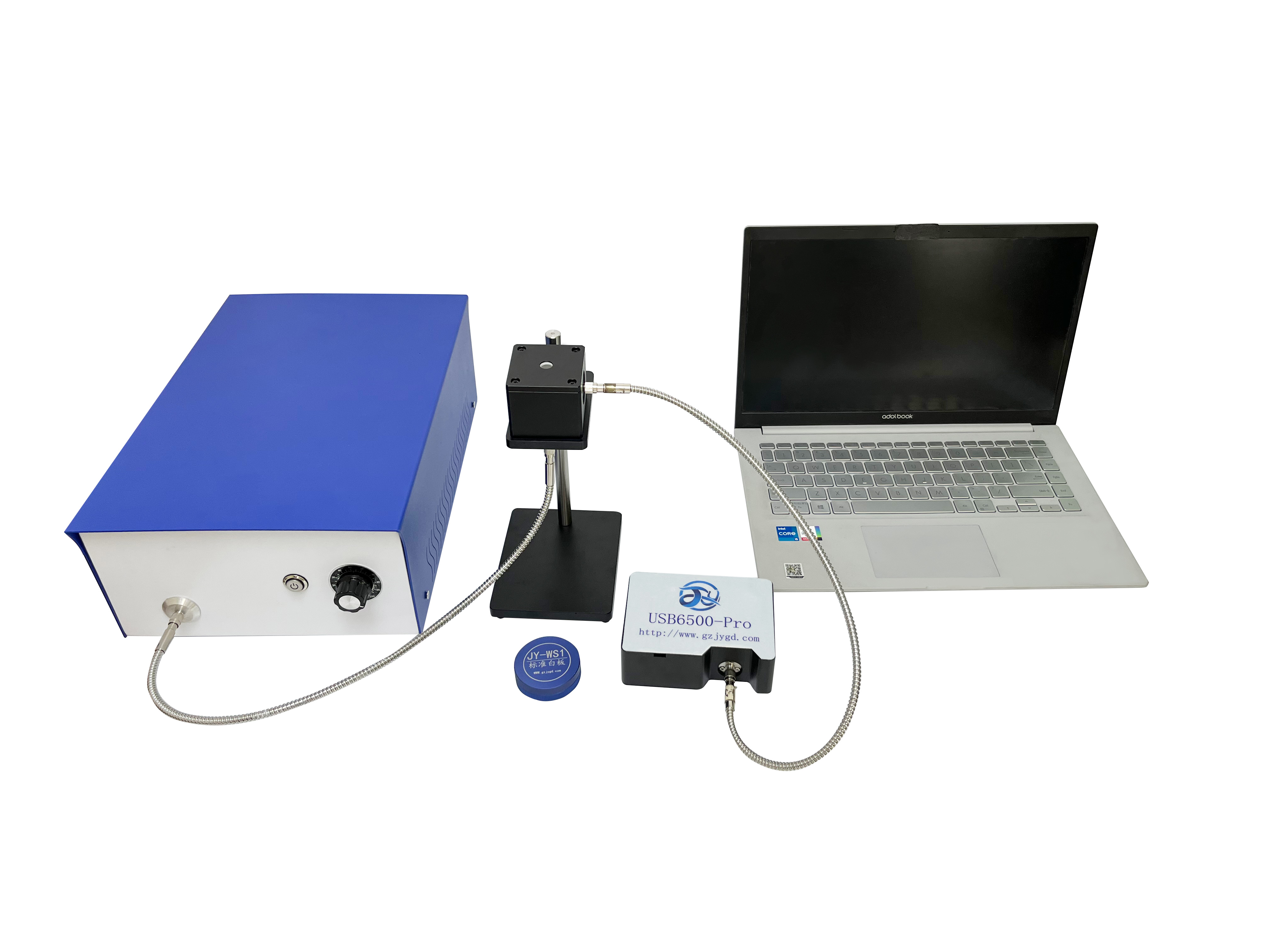
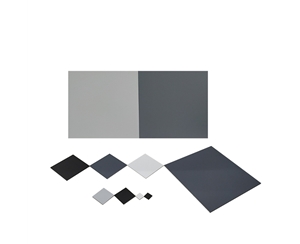
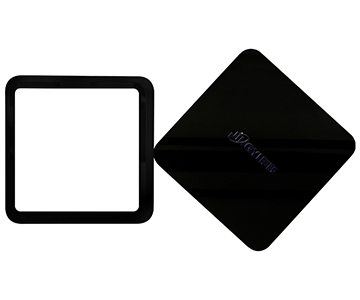
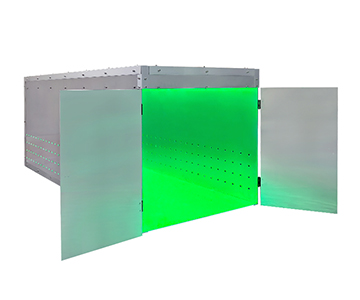
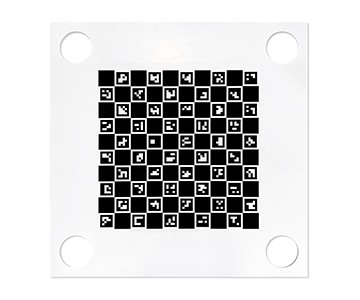
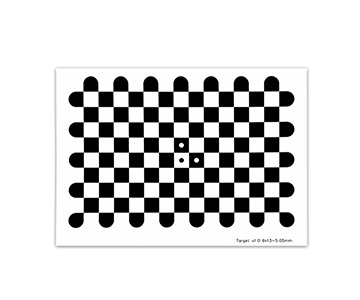
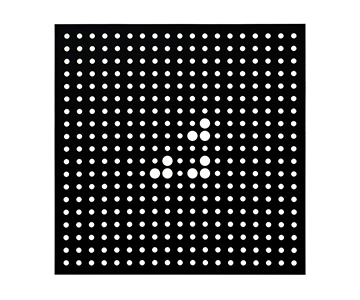
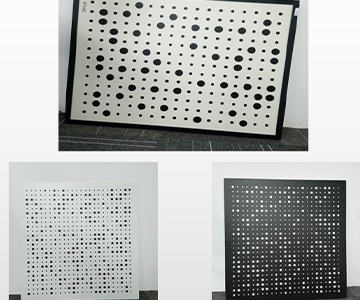
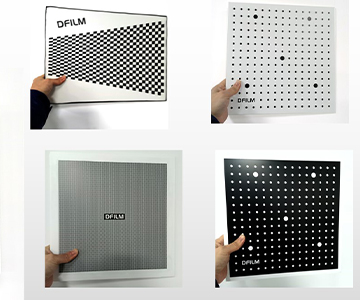
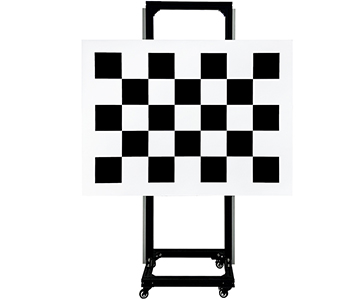
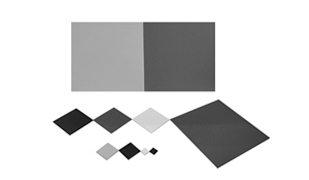
在激光雷达的应用中,激光雷达测距反射板起着至关重要的作用。景颐光电生产的LiDAR专用测试板,可用于激光雷达的目标距离校准。该测试板采用自主研发的技术工艺,具有诸多优势。
首先,其使用波长范围宽,可达250 - 2500nm,能够通用于常见的激光,如850nm、905nm、940nm和1550nm等。这使得该测试板能够适应不同类型的激光雷达,具有广泛的适用性。
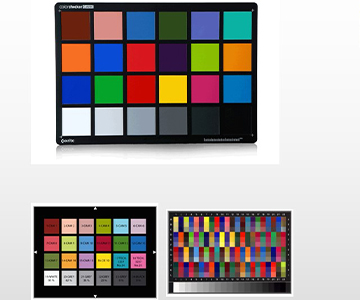
其次,反射率可从2% - 99%可选,且光谱平坦。这意味着用户可以根据实际需求选择合适的反射率,以满足不同的测试要求。同时,光谱平坦的特性保证了在不同波长下的反射率相对稳定,提高了测试的准确性和可靠性。
此外,该测试板还具有近完美的朗伯特性,能够实现均匀的漫反射,避免了因反射不均匀而导致的测试误差。同时,附带出厂反射检测仪报告,反射率数据准确,经过权威机构检测,进一步保证了产品的质量和可靠性。
在应用领域方面,景颐光电的激光雷达测距反射板广泛应用于激光雷达、飞行时间(TOF)、汽车自动驾驶系统以及手机LiDAR Scanner测试系统等领域。例如,在汽车自动驾驶系统中,通过使用激光雷达测距反射板对激光雷达进行校准,能够提高激光雷达对周围环境的感知精度,从而为汽车的自动驾驶提供更可靠的支持。
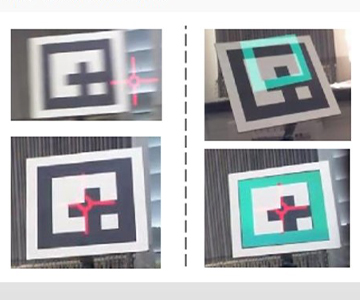
靶标部署要求:两个靶标之间的距离要大于500mm,靶标布置不能采用对称方式,应分布在行驶路径的两侧,并且不得等间距分布布置;在行驶路径全程需要至少能够探测到3个靶标,并且全程激光器到两个靶标之间的夹角大于3°;靶标的最优部署距离是4 - 8m。在现场不满足部署条件时,必须保证在距离雷达15米范围内可以获得4个以上满足上述条件的靶标;为了在工位处得到更高的定位精度,可以在工位处部署推荐距离的反光柱(4 - 6m),在路径点可以适当扩大反光靶标的间距,减少反光靶标的使用;为了减少靶标的使用,可以适当增加靶标的直径或宽度,优先推荐使用反光柱靶标,使用反光贴作为靶标的时候,适当减少反光贴的间距,保证满足上述要求;在全部采用反光贴作为靶标的环境中,尽量保证不是只有一种方向的反光贴,增加反光贴方向的多样性。现场环境要求:靶标距离货架方向的距离应大于货物堆叠时突出货架的距离,否则在大角度下,雷达扫描该靶标时会受到货物的干扰;实际雷达使用环境中,还会出现玻璃背景、大面积金属背景以及无尘车间中常使用的具有较高反射率的背景面,在这些具有较高反射率的环境中安装靶标,应避免将靶标安装在距离这类背景面较近的位置,至少保证有1米的水平距离,若无法避免,在靶标安装的背景面上贴上反射率较弱的贴纸,如透明磨砂贴纸这类漫反射贴纸,以减少背景面的反射对靶标检测的干扰;在实际使用过程中,通常会出现将靶标安装在拐角的位置,拐角分为凹角和凸角两种情况,凹墙面安装靶标,靶标距离墙角的距离应保证大于1m;凸墙面靶标安装应保证金属箍与墙面成45度的角度安装;对于不同面交错背景,环境中存在反射率差异较大的背景面安装靶标时,应将靶标安装在距离较强反射率面远端,距离要求至少1米的距离,如玻璃和墙体结合的墙面,靶标安装在距离玻璃面水平距离1米处较为合适。

总之,激光雷达反光板算法是激光雷达技术中的重要组成部分,其准确性和可靠性直接影响着激光雷达的性能。通过合理的高反特征提取、反光板及反光柱的聚类、反光板地图的构建以及定位精度测试等方法,能够有效地提高激光雷达的定位精度和建图质量。同时,激光雷达测距反射板的应用以及靶标部署要求和现场环境要求的满足,也为激光雷达在实际应用中的稳定运行提供了有力保障。景颐光电在激光雷达测距反射板领域的技术研发和产品创新,为激光雷达技术的发展和应用做出了重要贡献。
#激光雷达测距反射板 #激光雷达标定板 #标准反射板 #测距仪反射板 #漫反射标准板 #多光谱反射板

