


















































































































































新闻中心
NEWS
在当今数字化时代,计算机视觉技术已广泛应用于众多领域,而相机标定作为其中的关键环节,对于提升视觉系统的准确性和可靠性起着举足轻重的作用。相机在成像过程中,由于镜头的光学特性以及成像原理等因素,不可避免地会产生几何失真,这会严重影响图像质量和后续的处理精度。因此,相机标定技术应运而生,其核心在于通过特定的方法和工具,准确获取相机的各种参数,从而实现对图像的校正和优化。
/
相机标定的技术本质
相机标定,简而言之,是确定相机成像系统各种参数的过程,这些参数涵盖了内参和外参。内参主要包括焦距、主点坐标以及畸变系数等,它们决定了相机自身的光学特性和成像几何关系。外参则涉及相机相对于世界坐标系的位置和姿态信息。准确获取这些参数对于将图像的二维坐标转换为现实世界中的三维坐标至关重要,这是实现各种计算机视觉任务的基础。
结构特点
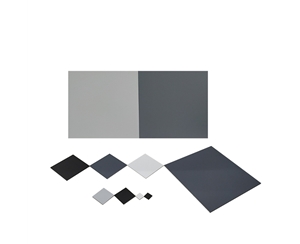
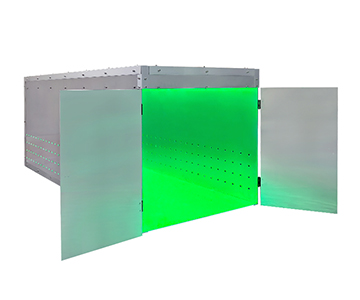
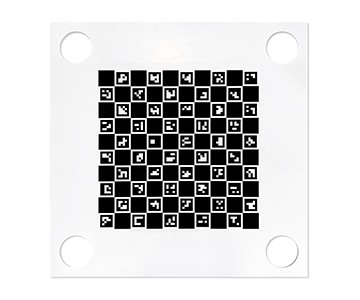
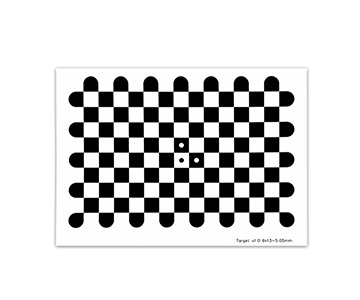
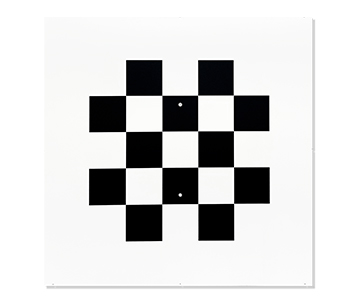
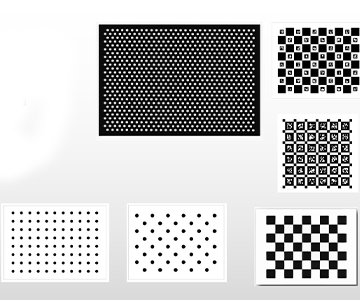
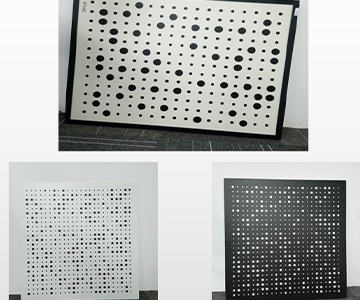
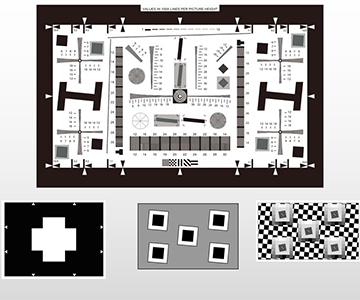
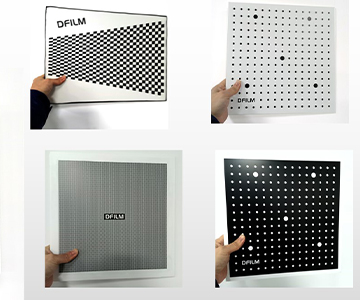
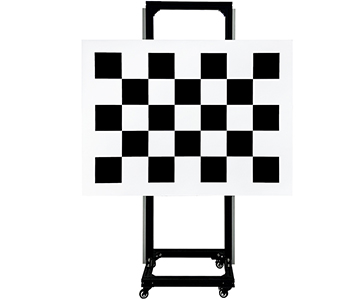
LDW视觉测试参比板的结构设计十分精巧。它由规则排列的黑白相间正方形格子构成,每个格子的尺寸精确且已知。这种高对比度的图案设计,使得在不同光照条件下,相机都能够清晰地识别和检测到棋盘格的角点,为后续的标定计算提供了可靠的基础。
/
与其他标定板的比较优势
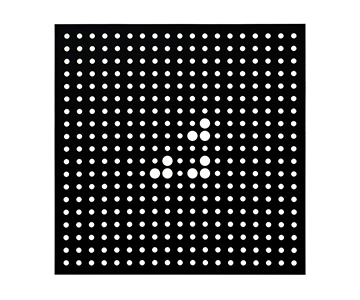
与圆标志标定板相比,LDW视觉测试参比板具有算法成熟、计算速度快的优点。在实际应用中,其角点检测算法相对简单且高效,能够快速准确地提取出棋盘格的角点坐标。而圆标志标定板虽然在某些高精度场合具有优势,但在计算速度和识别方面可能稍逊一筹。
相机标定在多领域的应用
工业测量领域
在工业生产中,对于测量精度的要求越来越高。LDW视觉测试参比板在工业测量领域有着广泛的应用。例如,在汽车制造行业,用于对汽车零部件的尺寸测量和质量检测。通过使用该标定板对相机进行标定,可以获取精确的相机参数,从而实现对零部件的高精度测量,确保产品质量符合标准。
机器视觉系统领域
机器视觉系统是现代工业自动化的重要组成部分,它能够实现对物体的识别、检测和定位等功能。相机标定作为机器视觉系统的基础环节,其准确性直接影响到整个系统的性能。
以物流仓储行业为例,机器人需要通过视觉系统对货物进行识别和抓取。在这个过程中,LDW视觉测试参比板被用于对机器人视觉系统中的相机进行标定。通过标定,可以提高相机的测量精度和定位准确性,使得机器人能够准确地抓取货物,提高物流仓储的效率和准确性。
相机标定的技术优势
提高测量精度
通过使用LDW视觉测试参比板进行相机标定,可以准确获取相机的内参和外参,从而消除或减小相机成像过程中的几何失真,提高测量精度。这对于需要高精度测量的领域,如航空航天、精密制造等,具有重要意义。
增强系统稳定性
准确的相机标定可以提高机器视觉系统的稳定性和可靠性。在实际应用中,环境因素如光照变化、物体表面反射等都会对相机成像产生影响。通过相机标定,可以对这些因素进行补偿,使得系统在不同环境条件下都能够稳定运行。
降低成本
相比其他高精度测量设备,使用LDW视觉测试参比板进行相机标定的成本较低。它不需要复杂的设备和昂贵的传感器,只需要一个标定板和一台相机即可完成标定过程。这使得相机标定技术能够广泛应用于各个领域,降低了企业的测量成本。
/
基于OpenCV的相机标定步骤
图像采集与预处理
首先,需要使用相机拍摄一系列包含LDW视觉测试参比板的图像。在拍摄过程中,应注意保持相机与标定板的相对位置和姿态有一定的变化,以获取足够多的标定信息。
拍摄完成后,对采集到的图像进行预处理。预处理包括转换为灰度图像、滤波去噪以及对比度增强等操作。通过这些操作,可以提高图像的质量,为后续的特征点检测和匹配提供更好的条件。
特征点检测与匹配
使用OpenCV中的角点检测算法,如Harris角点检测算法或Shi - Tomasi角点检测算法,对预处理后的图像进行角点检测。这些算法能够准确地检测出棋盘格的角点,并返回角点的坐标。
检测到角点后,需要在不同的图像之间对这些角点进行匹配。匹配的目的是找到同一角点在不同图像中的对应位置。OpenCV提供了多种特征点匹配算法,如暴力匹配算法(Brute - Force Matcher)和FLANN匹配算法(Fast Library for Approximate Nearest Neighbors)等。通过选择合适的匹配算法,可以提高角点匹配的准确性和效率。
内外参数估计与标定板检测
根据匹配到的角点坐标,使用OpenCV中的相机标定函数cv2.calibrateCamera()估计相机的内外参数。该函数通过最小化重投影误差来求解相机的内参矩阵、畸变系数以及外参矩阵。
在估计相机参数的同时,还可以通过分析重投影误差来评估标定板检测的准确性。重投影误差是指将世界坐标系中的点通过相机模型投影到图像平面上,与实际检测到的角点坐标之间的误差。通过分析重投影误差,可以判断标定板检测是否准确,以及相机参数的估计是否可靠。
畸变矫正与标定结果验证
获取相机的内外参数后,使用OpenCV中的畸变矫正函数cv2.undistort()对图像进行畸变矫正。畸变矫正可以消除或减小相机成像过程中的径向畸变和切向畸变,使得图像中的直线更加笔直,物体的形状更加真实。
最后,通过比较矫正前后图像的特征点位置差异来验证标定结果的准确性。如果矫正前后图像的特征点位置差异较小,则说明标定结果准确可靠;反之,则需要重新进行相机标定。
相机标定的发展趋势
随着计算机技术和图像处理技术的不断发展,相机标定技术也在不断创新和完善。未来,相机标定技术将朝着自动化、智能化和高精度化的方向发展。
自动化标定技术
传统的相机标定过程需要人工干预,如手动选择标定板、拍摄图像以及调整相机参数等。这些操作不仅繁琐,而且容易受到人为因素的影响,导致标定结果不准确。未来,自动化标定技术将成为相机标定的发展趋势之一。通过使用人工智能和机器学习技术,相机可以自动识别标定板、拍摄图像并进行相机标定,从而提高标定的效率和准确性。
智能化标定技术
智能化标定技术是指利用机器学习和深度学习技术,对相机标定过程进行优化和改进。例如,通过使用深度学习模型,可以自动检测和识别标定板上的特征点,提高特征点检测的准确性和效率。同时,深度学习模型还可以根据不同的应用场景和需求,自动调整相机参数,提高相机的适应性和鲁棒性。
高精度化标定技术
在一些对测量精度要求较高的领域,如航空航天、医学影像等,对相机标定的精度要求也越来越高。未来,高精度化标定技术将成为相机标定的重要发展方向之一。通过使用更先进的测量设备和技术,如激光跟踪仪、三维扫描仪等,可以提高相机标定的精度,满足不同领域的需求。
相机标定技术作为计算机视觉领域的核心技术之一,在工业测量、机器视觉系统等多个领域有着广泛的应用。LDW视觉测试参比板作为一种常用的标定工具,具有结构简单、易于制作和使用等优点,为相机标定提供了可靠的保障。随着技术的不断发展,相机标定技术将不断创新和完善,为各个领域的发展提供更加强有力的支持。
/
#ARVR视觉定位板 #360全景摄像头视觉测试参比板 #数码镜头测试视觉图卡 #圆点视觉目标板 #LDW视觉测试参比板 #棋盘格标定板GPG1200 - 7*5 - 150

