


















































































































































新闻中心
NEWS
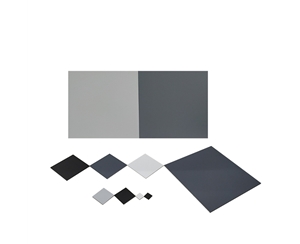
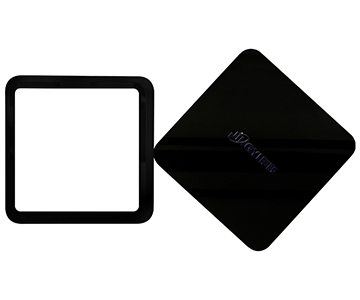
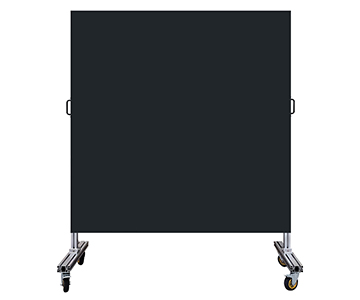
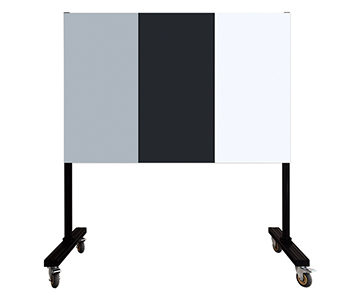
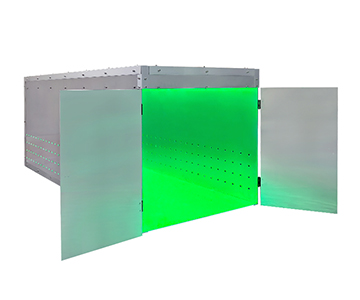
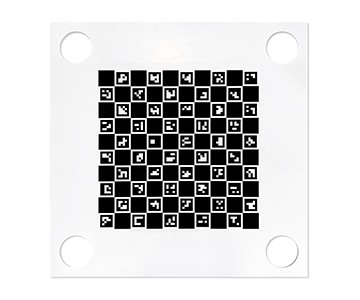
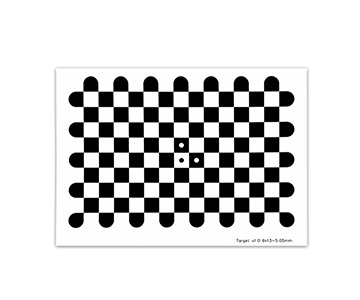
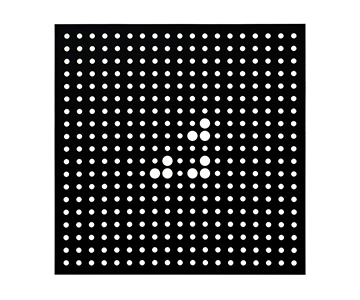
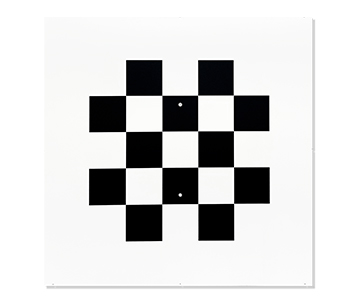
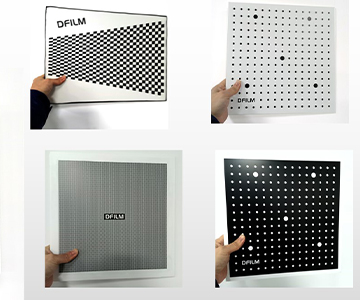
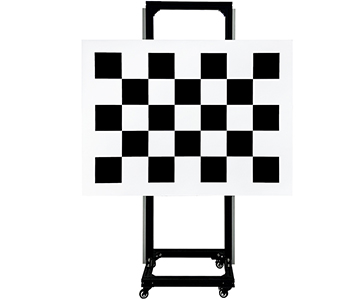
在当今计算机视觉技术蓬勃发展的时代,车载摄像头视觉校准板作为一种关键的标定工具,在诸多领域发挥着不可或缺的作用。以景颐光电研发的车载摄像头视觉校准板GPG1200 - 7*5 - 150为例,它由规则的黑白相间格子组成,其独特的设计为精确确定相机的内外成像参数提供了有力支持。
/
相机标定与车载摄像头视觉校准板的紧密关联
相机标定,作为计算机视觉领域的基石技术,旨在构建相机成像系统与现实世界之间的精确数学模型。通过这一过程,我们能够获取相机的内参,如焦距、主点、畸变系数等,以及外参,即相机相对于世界坐标系的位置和姿态。这些参数对于实现从像素坐标到世界坐标的准确转换,以及后续的三维重建、机器视觉检测、增强现实应用等至关重要。
在相机标定过程中,车载摄像头视觉校准板凭借其规则的黑白格子结构,成为了不可或缺的基准工具。其在图像中易于识别的特性,为标定提供了大量已知几何信息的点,这些点在不同视角下的图像中都能被准确检测,从而成为计算相机参数的关键参考点。与其他类型的标定板相比,车载摄像头视觉校准板具有简单、准确、高效的显著优势,如易于生成、易被算法检测、角点定位精确等特性,这使得它成为相机标定中最为常用的工具之一。
/
图像采集与角点检测技术的关键要点
在相机标定中,图像采集是基础环节,其质量直接影响后续标定的准确性和可靠性。高质量的图像采集需要合适的设备和适当的环境设置。采集设备的选型与设置:选择高分辨率相机,其能提供更多细节,有助于提高角点检测精度。同时,相机镜头畸变系数应尽量小,以减少对标定精度的影响。此外,相机的像素大小、信噪比和动态范围也是关键因素。在设置相机时,需根据实际环境调整曝光时间、增益、光圈大小等参数,确保图像不过曝或欠曝,保持足够亮度和对比度,增益尽量低以减少噪声但保证图像亮度,光圈大小调整至适中以保证景深和图像清晰度。采集环境的搭建和优化:采集环境要根据车载摄像头视觉校准板特性和相机视野范围搭建,避免强光直射、反射或阴影,防止对角点检测产生干扰。同时,要考虑背景整洁性,避免背景中有与校准板颜色相近的元素,防止误检。在采集过程中,要保持校准板稳定,避免抖动引起图像模糊。
角点检测技术是图像处理的关键步骤,直接影响相机标定的最终结果。角点检测算法众多,如Harris角点检测器、Shi - Tomasi角点检测器和Fast角点检测器等。这些算法虽各有特点,但目标都是定位图像中的角点特征。Harris角点检测器通过计算图像块的梯度乘积检测角点,对亮度和对比度变化有较好鲁棒性但对旋转敏感;Shi - Tomasi角点检测器是Harris算法的改进版,通过评估最小特征值确定角点,具有更好的旋转不变性;Fast角点检测器适用于快速实时应用,通过评估像素亮度变化快速识别角点但对噪声敏感。在实际应用中,需综合考虑图像质量和标定精度需求,选择合适的角点检测策略,如结合多种算法,利用各自优点,或对图像进行预处理提高角点检测准确度,并进行后处理去除错误检测和填补遗漏的角点。
世界坐标与像素坐标对应关系的建立
在相机标定中,建立世界坐标与像素坐标的对应关系是实现精确标定的重要步骤。这涉及坐标系的定义和转换关系。坐标系的定义和转换关系:相机坐标系以摄像头光心为原点,其X、Y和Z轴分别对应图像的宽度、高度和深度方向;世界坐标系通常相对于特定场景或物体定义,是固定不变的坐标系。对于世界坐标系到相机坐标系的转换,需确定物体的三维坐标位置,使用车载摄像头视觉校准板时,其角点对应世界坐标系中的已知点,通过测量校准板在世界坐标系中的位置和角度,可建立变换矩阵。像素坐标系是二维坐标系,原点位于图像左上角,X和Y轴沿图像水平和垂直方向。通过标定过程中的内外参数求解,得到相机内参矩阵,结合世界坐标系到相机坐标系的变换,可得到从世界坐标系到像素坐标系的完整变换关系。坐标对应关系的建立方法:为建立对应关系,车载摄像头视觉校准板要按特定规则摆放,并对每个角点进行世界坐标标记。摄像头内外参数的标定是关键步骤,包括图像采集、角点检测和标定算法,常用的标定算法有直接线性变换算法(DLT),通过求解线性方程组得到内参矩阵和变换矩阵中的平移向量和旋转矩阵。
标定矩阵的构建与优化
在计算机视觉和机器视觉领域,标定矩阵是连接物理世界坐标和摄像机图像像素坐标的关键。它包含摄像机的内参和外参信息,是将三维世界坐标转换为二维图像像素坐标的必要参数。标定矩阵构建涉及线性代数中的矩阵运算、几何变换以及优化算法,通过最小二乘法优化参数可得到更精确的标定矩阵。
在实际标定过程中,不可避免存在误差,如测量误差、图像噪声和模型简化误差等。重投影误差分析是评估标定精度的有效方法,通过将三维世界坐标点投影回二维图像平面与实际成像位置对比计算误差,若误差过大需重新计算和校正参数。优化标定矩阵可采用多种策略和技术,如多角度拍摄获取更全面图像信息,提高标定鲁棒性;使用高分辨率相机和良好拍摄环境减少噪声,提高角点检测准确性;采用先进的角点检测算法,如亚像素级角点检测提高角点定位精度;引入迭代优化过程,如Levenberg - Marquardt算法提高解算精度和收敛速度;利用成熟的标定软件工具,如OpenCV、MATLAB等进行标定和优化。
以OpenCV库为例,可使用cv2.calibrateCamera函数进行标定矩阵优化,通过设置不同的flags参数实现不同的优化策略,如固定内参矩阵只优化畸变系数。优化后的标定矩阵可用于图像校正、特征点匹配和三维重建等应用,以提高重建模型的精度和准确性。
标定结果的广泛应用与深远影响
标定结果在三维重建、机器人导航等领域具有重要应用和深远影响。在三维重建中,摄像机标定是确定摄像机内参和外参的关键过程,其精度直接影响从二维图像到三维空间点的转换准确性,进而影响重建模型的质量。若标定过程存在误差,会导致内参和外参解算偏差,影响三维点定位准确性,造成重建模型几何形态和细节失真。在机器人导航中,摄像头标定为机器人提供必要的几何信息,使其能准确对环境中的物体进行定位和追踪,实现精确的导航和避障。例如,自动导引车(AGV)在仓库中运输物品时,摄像头标定确保其能正确识别货架标签和位置以及周围人的位置,进行有效路径规划和动态避障。
尽管摄像头标定技术已相对成熟,但在实际应用中仍面临一些挑战,如标定过程需在特定环境下进行,环境变化可能需重新标定,且对操作者技能要求较高,误操作会影响标定准确性。未来发展趋势将集中在提高标定自动化水平,减少人工干预,提高准确性和效率;探索更广泛条件下工作的标定算法,提升系统鲁棒性;利用深度学习技术优化角点检测和内外参解算等方面。随着技术的不断创新和发展,摄像头标定技术将在机器人导航、虚拟现实、增强现实、自动驾驶等多个领域发挥更重要的作用。
标定过程中的常见问题与解决方案
在相机标定过程中,可能会遇到各种问题,了解问题成因和影响有助于采取有效解决方案提高标定效率和质量,为后续的计算机视觉应用提供准确可靠的基础。环境光源干扰:环境光源不稳定或反射会影响角点检测,导致标定精度下降。解决方案是使用均匀光源照明车载摄像头视觉校准板,避免反射光干扰,可采用漫反射材料作为校准板背景降低反射影响,如使用环形灯进行均匀照明,安装时保持一定高度和距离,并调整亮度适应不同环境和校准板材质。摄像头噪声影响:摄像头长时间运行产生的噪声会影响图像质量和角点检测精度。解决方案是在采集图像前让摄像头预热达到稳定温度状态,采用高质量摄像头减少噪声产生,还可利用软件对噪声进行滤除,如使用cv2.medianBlur函数执行中值滤波去除高斯噪声。校准板摆放不当:车载摄像头视觉校准板放置不平或角度不当会导致测量的内外参数出现偏差。解决方案是确保校准板水平放置且与摄像头正对,可使用三脚架或其他辅助工具固定校准板,还可开发软件工具通过视觉反馈提示用户调整校准板位置。
/
#手机摄像头视觉定位板 #红外相机视觉校准板 #车载摄像头视觉校准板 #多视觉融合激光雷达校准板 #VQA测试图卡视觉校准板 #棋盘格标定板

