















































































































































































































当下工业缺陷检测、自动驾驶环境感知、三维重建等计算机视觉场景的落地精度,核心前提就是相机参数标定的可靠性,而双目相机标定板作为标定过程的基准参照物,其图案设计、物理尺寸、基材性能的选择直接决定了最终标定结果的误差范围。很多开发者在选型时往往容易混淆不同双目相机标定板的适配场景,最终导致标定结果鲁棒性不足,甚至出现视觉系统精度不达标的问题。
各自适配不同的应用场景:
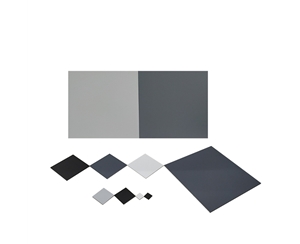
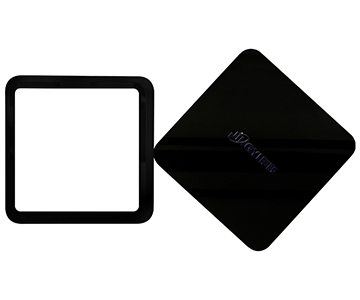
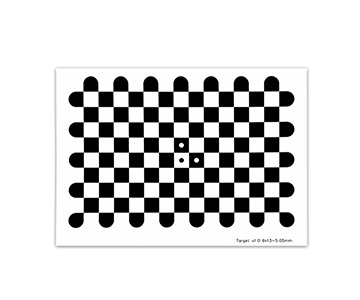
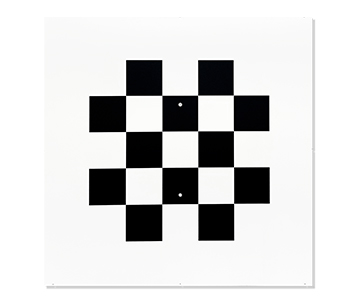
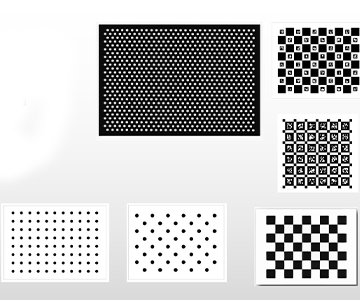
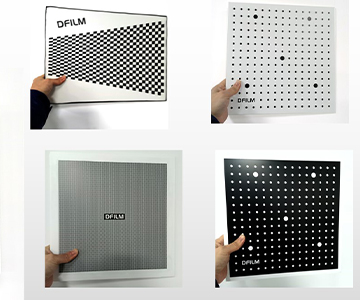
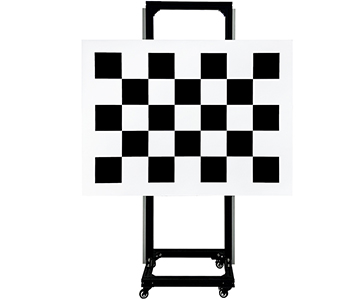
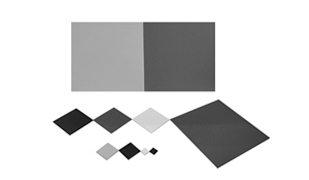
棋盘格双目相机标定板应用广泛,主流视觉算法库的检测逻辑是先对采集图像做二值化分割,提取出黑白格对应的四边形轮廓,再通过预设的网格尺寸参数过滤无效轮廓,匹配出符合排布规则的角点阵列。这类图案的核心特点在于角点属于数学层面的鞍点特征,几乎不存在透视畸变带来的系统偏差,配合亚像素细化算法可将角点定位精度提升到像素级以下,非常适合单相机高精度标定场景。不过传统的OpenCV棋盘格检测要求完整图案全部出现在画面内,难以采集到画面边缘的畸变特征数据,不利于大广角镜头的畸变参数求解;另外若棋盘格行列数均为偶数,会出现180度旋转的识别歧义,不适用双目或多相机联合标定场景。景颐光电推出的GPG1200 - 7*5 - 150系列棋盘格双目相机标定板,针对性采用奇偶数搭配的行列排布设计,完全消除旋转识别歧义,同时采用高对比度耐磨基材制作,图案精度可达微米级,适配工业用高精度标定需求。
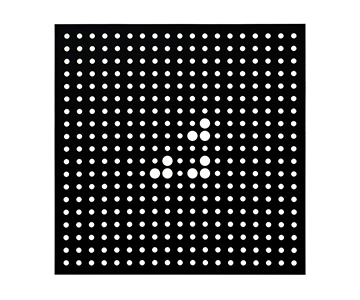
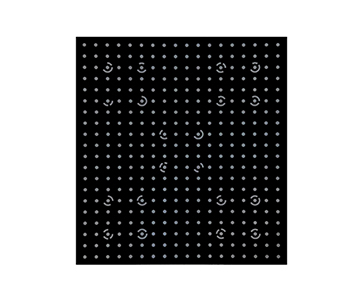
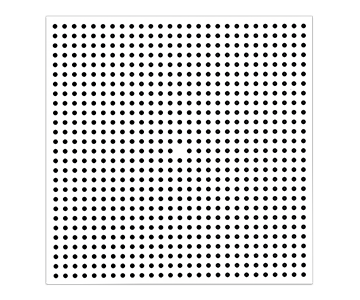
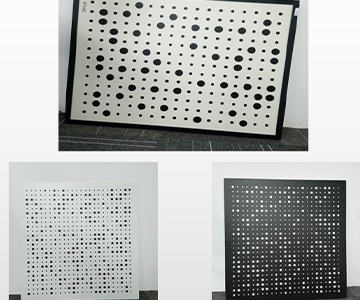
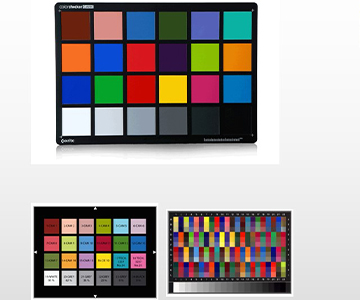
圆形网格双目相机标定板分为对称排布和不对称排布两种,其检测逻辑是通过斑点识别算法提取画面中的圆形特征,再通过圆度、面积、凸度等参数过滤噪点,匹配出符合排布规则的特征点阵列。这类双目相机标定板的特点是特征提取时可利用圆形边缘的所有像素数据,抗图像噪声能力更强,适合工业现场光照不稳定场景。不过由于圆形在倾斜拍摄时会被成像为椭圆,当镜头畸变较大时,椭圆拟合会存在微小系统偏差,同时对称排布的圆形网格同样存在180度旋转识别歧义,仅适用于单相机标定,多相机联合标定需选择不对称排布款式。
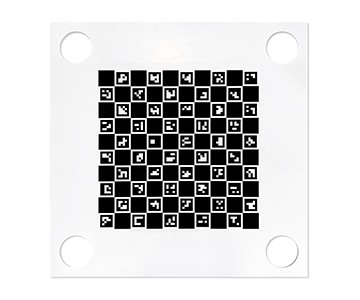
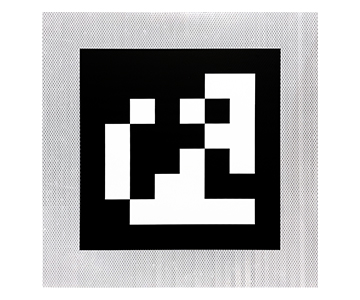
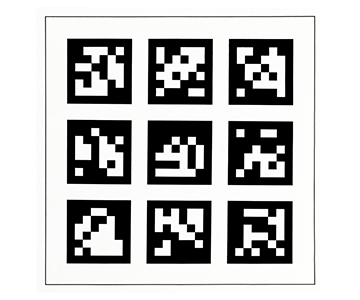
近年普及的升级型Charuco双目相机标定板,本质是将棋盘格角点与ArUco编码标签结合,每个棋盘格区域有唯一身份编码,因此无需完整图案出现在画面中即可完成特征识别,即便双目相机标定板被部分遮挡或局部反光导致部分图案无法识别,剩余有效特征仍可完成标定求解。这类双目相机标定板特别适合大广角、鱼眼镜头标定,可灵活调整拍摄角度采集画面边缘畸变数据,大幅提升畸变参数求解鲁棒性,同时天然不存在旋转识别歧义,适配单目、双目、多相机等全类型标定需求,只是检测逻辑相对复杂,需搭配OpenCV 3.0及以上版本扩展库完成集成。
综合来看,普通单相机小视场标定优先选择成本更低的棋盘格双目相机标定板,工业复杂光照场景可选择抗噪性更强的圆形网格双目相机标定板,大广角、多相机或现场条件受限场景优先选择Charuco双目相机标定板。景颐光电作为国内专业的光学检测基准器件供应商,可提供全系列定制化双目相机标定板产品,覆盖从消费级到工业用微米级的全精度需求,还可根据用户具体应用场景提供选型适配方案,帮助开发者降低标定过程试错成本,提升视觉系统落地精度。
#视觉识别标定板 #自动化识别标定板 #自动化定位标定板 #机器人标定板 #双目相机标定板 #标定板

