


















































































































































新闻中心
NEWS
不少做3C视觉检测、工业分拣的工程师都遇到过类似的问题:实验室里调试完好的相机,到了产线现场一开环形补光灯就标定失败,或是检测产品边缘尺寸时误差始终超标,排查了算法、硬件接口都没找到问题,最后才发现是前期圆点标定板选型踩了坑。作为机器视觉感知系统的核心空间基准,圆点标定板的适配性直接决定了整套视觉方案的精度天花板,百分之八十以上的视觉测量误差根源都能追溯到标定环节的基准偏差。
很多开发者对圆点标定板的初始认知停留在图案类型,却忽略了物理尺寸与检测视场的匹配逻辑才是精度基础。标定的核心是让相机捕捉到的基准特征覆盖全视场的畸变分布,如果圆点标定板尺寸过小,仅能覆盖画面中心区域,那镜头边缘的径向畸变、切向畸变参数就没法被有效约束,哪怕后续算法再优化也补不了前期的基准偏差。行业通用的选型准则是,圆点标定板正对相机时,投影面积至少要覆盖画面有效像素的二分之一以上,而且标定过程中不能随意调整相机焦距、光圈参数,否则对焦距离变化会导致成像倍率偏移,直接让之前的标定结果失效。
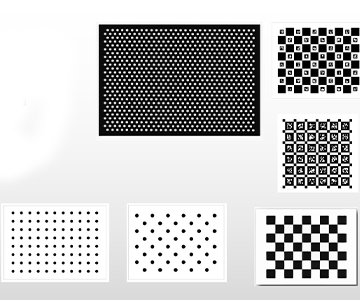
当前市面主流的圆点标定板可以分为三类,分别适配不同的应用场景,各自的优缺点也十分清晰:
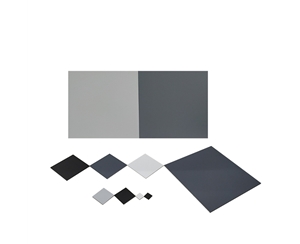
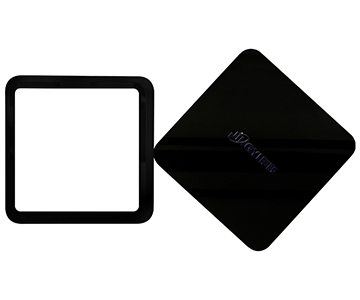
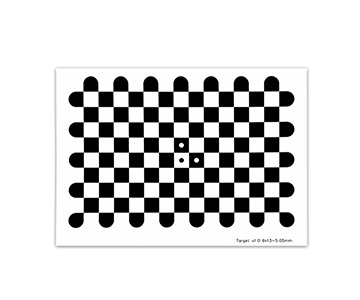
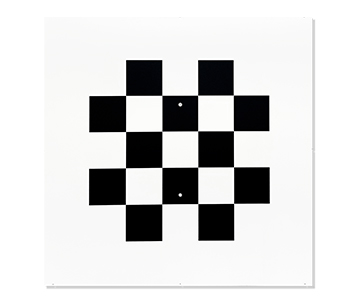
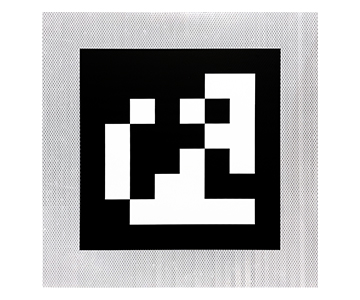
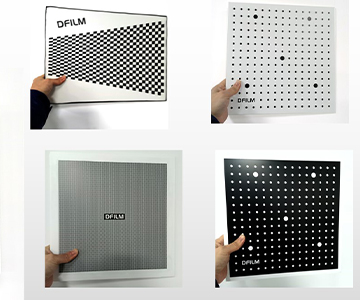
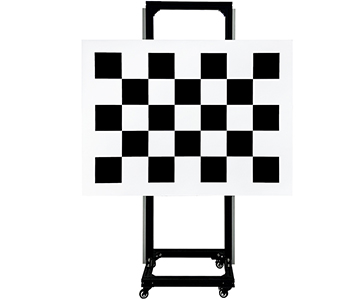
这类圆点标定板的核心优势是角点(数学定义为鞍点)的空间定位无偏性,哪怕存在透视变换或者轻微畸变,角点的坐标属性也不会发生偏移,配合亚像素细化算法,能通过角点周边的灰度分布把定位精度提升到零点零一像素级,基本满足常规工业检测、单目视觉的标定需求。不过通用OpenCV的棋盘格检测算法要求完整图案全部出现在画面中,没法采集画面边缘的畸变特征,而且如果行列数均为偶数的话,会存在180度旋转的识别歧义,多目立体标定场景下很容易出现特征匹配错误。针对这一痛点,景颐光电的GPG1200 - 7*5 - 150系列棋盘格圆点标定板特意采用奇偶交错的行列设计,有效消除了旋转歧义,而且基材采用高耐磨的氧化铝陶瓷材质,图案精度可达±1μm,适配从10mm到2m的全视场标定需求,已经在3C检测、工业分拣等场景实现了规模化应用。
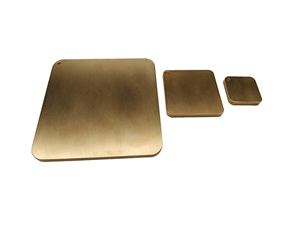
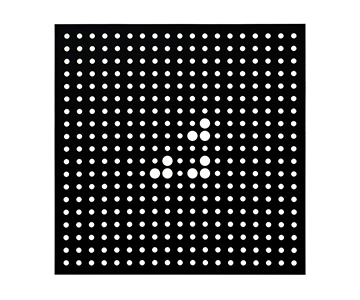
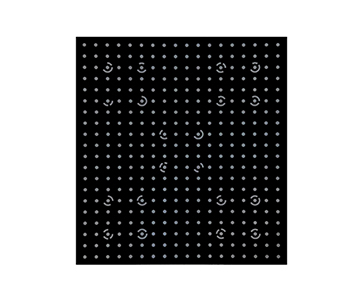
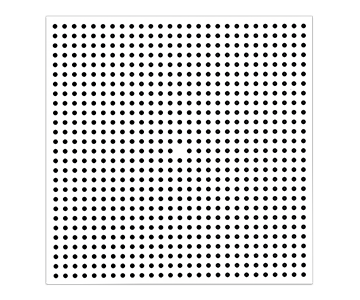
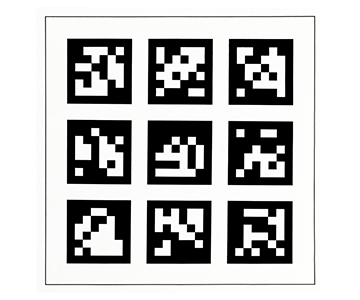
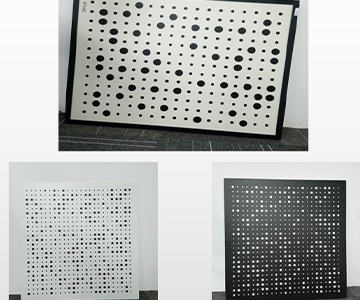
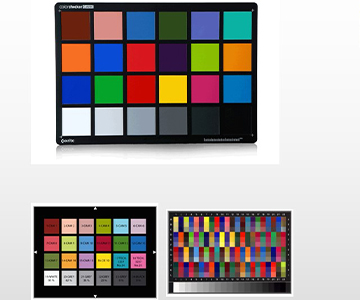
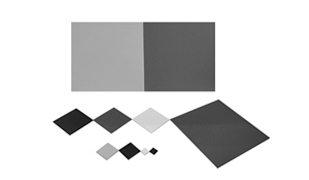
这类产品更适合存在轻微图像噪声的工业场景,它的检测逻辑是通过识别画面中的斑点特征,通过面积、圆度、凸度等参数过滤无效特征,而且圆形的边缘像素数量远多于棋盘格角点,能抵消一部分CMOS噪声带来的定位偏差。不过受透视变换影响,圆形在倾斜拍摄时会成像为椭圆,如果镜头畸变量较大的话,椭圆拟合会存在微小的系统偏差,不过常规工业镜头的畸变通常低于百分之二,这一偏差基本可以忽略。另外对称式圆形网格同样存在180度旋转的识别歧义,多目标定场景下建议优先选择非对称网格的款式,避免特征匹配出错。
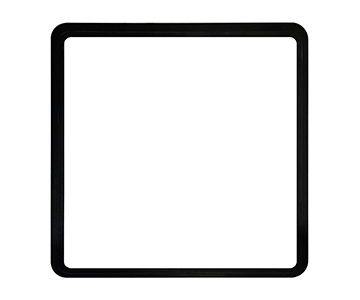
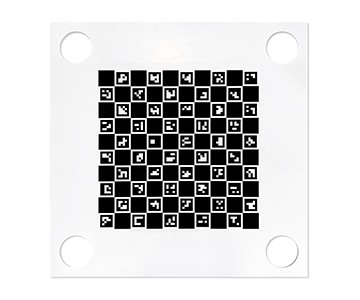
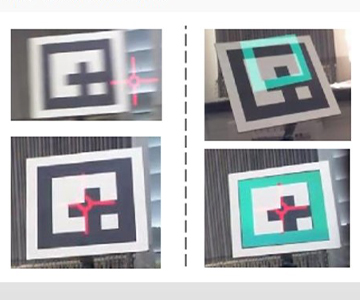
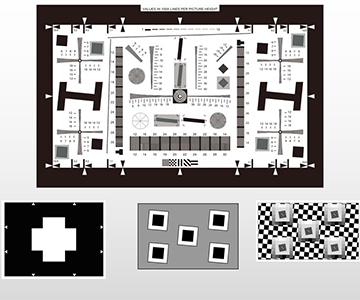
这类产品相当于把ArUco编码标识和棋盘格做了融合,每个棋盘格区块都有独特的编码,哪怕只有部分图案出现在画面中,或者局部存在反光、遮挡,算法也能通过编码识别出剩余的有效角点,能轻松采集到画面边缘的畸变特征,大幅提升畸变校正的鲁棒性。不过Charuco的检测算法复杂度更高,需要OpenCV3.0以上的contrib库支持,开发门槛比前两类圆点标定板稍高。景颐光电也可以根据客户的实际场景需求,定制不同编码规则、不同尺寸的Charuco圆点标定板,还配套提供简化版的检测调用接口,能帮助开发者把标定流程的开发周期缩短百分之四十以上。
总结来看,单目常规检测场景、预算有限的情况下优先选棋盘格圆点标定板;多尘、有轻微噪声的工业场景可以选圆形网格圆点标定板;多目标定、复杂光照、需要超高畸变校正精度的场景优先选Charuco圆点标定板。未来随着AI算法和标定技术的融合,自适配式圆点标定板也会逐步落地,景颐光电也在布局搭载主动发光模块的智能圆点标定板,能自动适配不同光照、不同视场的标定需求,进一步降低机器视觉系统的标定门槛。
#自动驾驶标定板 #双目相机标定板 #圆点标定板 #机器人识别标定板 #机器人标定板 #标定板

