The physical specifications selection of stereo camera calibration boards is the top-priority decision.
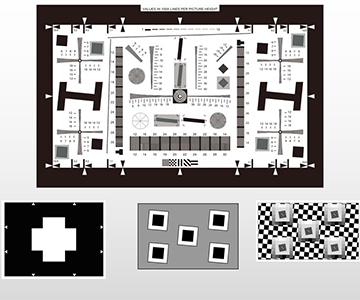
The deployment accuracy of current computer vision applications—including industrial defect detection, autonomous driving environmental perception, and 3D reconstruction—fundamentally hinges on the reliability of camera parameter calibration. As the reference standard throughout the calibration process, the stereo camera calibration board’s pattern design, physical dimensions, and substrate performance directly determine the final calibration error margin. Many developers inadvertently confuse the suitability of different stereo calibration boards for specific use cases, ultimately resulting in insufficient calibration robustness—or even failure to meet required visual system accuracy standards.
Currently, industry-standard stereo camera calibration boards fall into three main categories, each optimized for distinct application scenarios:
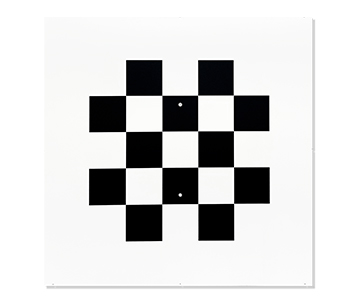
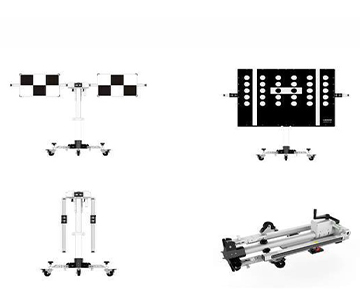
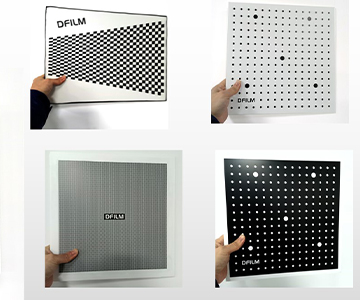
**1. Checkerboard-pattern stereo camera calibration boards**
Widely adopted across the industry, mainstream computer vision libraries detect these patterns by first binarizing captured images and extracting quadrilateral contours corresponding to black-and-white squares. Invalid contours are then filtered using preset grid dimension parameters, enabling identification of corner point arrays conforming to the expected layout. The core strength of this pattern lies in its mathematical saddle-point nature at corners—making it highly resistant to systematic bias induced by perspective distortion. Combined with sub-pixel refinement algorithms, corner localization accuracy can reach sub-pixel levels, making it ideal for high-precision single-camera calibration. However, conventional OpenCV checkerboard detection requires the *entire* pattern to be fully visible within the image frame, limiting acquisition of distortion data from image edges—thus hindering accurate distortion parameter estimation for wide-angle lenses. Additionally, when both row and column counts are even numbers, 180° rotational ambiguity arises during detection, rendering such boards unsuitable for stereo or multi-camera joint calibration. Jingyi Optoelectronics’ GPG1200–7×5–150 series checkerboard calibration board specifically adopts an odd-even row/column configuration to completely eliminate rotational ambiguity. Manufactured using high-contrast, wear-resistant substrates, its pattern accuracy reaches the micrometer level—meeting stringent industrial high-precision calibration requirements.
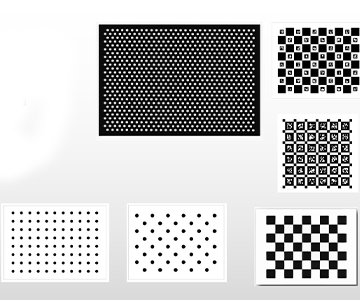
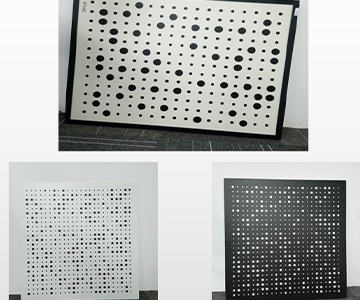
**2. Circular-grid stereo camera calibration boards**
Available in both symmetric and asymmetric layouts, these boards rely on blob detection algorithms to identify circular features in the image. Noise points are filtered based on metrics including circularity, area, and convexity, followed by matching to a predefined feature point array. Their key advantage lies in leveraging *all edge pixels* of each circle during feature extraction—conferring superior noise immunity, especially under unstable industrial lighting conditions. However, due to perspective projection, circles appear as ellipses under tilt; with significant lens distortion, ellipse fitting introduces small systematic errors. Moreover, symmetric circular grids suffer from the same 180° rotational ambiguity, restricting them to single-camera calibration only. For stereo or multi-camera joint calibration, asymmetric layouts must be used.
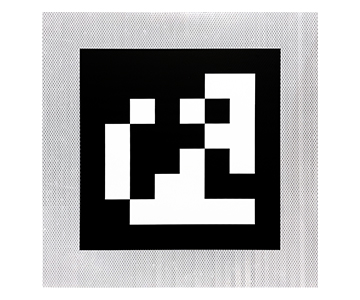
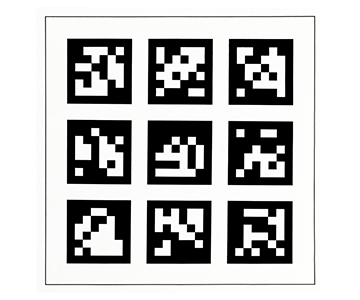
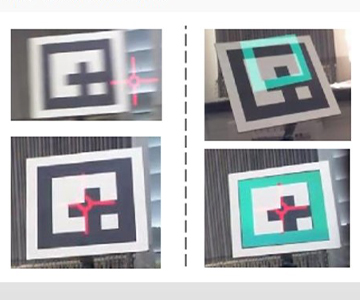
**3. Charuco-based stereo camera calibration boards (upgraded type, recently gaining widespread adoption)**
Charuco boards integrate checkerboard corners with ArUco-encoded markers: each checkerboard cell carries a unique identity code. Consequently, full pattern visibility is *not required* for reliable feature detection—even partial occlusion or localized glare-induced pattern loss does not prevent successful calibration, as remaining valid features suffice for solving calibration parameters. This makes Charuco boards particularly well-suited for ultra-wide-angle and fisheye lens calibration. Users can flexibly adjust shooting angles to capture edge-region distortion data, significantly enhancing robustness in distortion parameter estimation. Crucially, they inherently eliminate rotational ambiguity and support all calibration modalities—monocular, stereo, and multi-camera systems alike. Their primary trade-off is increased algorithmic complexity, requiring integration with OpenCV 3.0+ extended libraries.
In summary:
- For standard single-camera, narrow-field-of-view calibration, cost-effective checkerboard boards are optimal.
- For industrial environments with complex, variable lighting, circular-grid boards offer superior noise resilience.
- For wide-angle, multi-camera, or space-constrained on-site deployments, Charuco boards are strongly recommended.
As a leading domestic supplier of precision optical metrology reference components, Jingyi Optoelectronics offers a full portfolio of customizable stereo camera calibration boards—from consumer-grade to industrial-grade micrometer-accuracy solutions. We also provide application-specific selection and adaptation guidance tailored to users’ exact operational requirements—helping developers minimize trial-and-error costs during calibration and maximize real-world visual system accuracy.
#VisionCalibrationBoard #AutomatedCalibrationBoard #AutomatedLocalizationBoard #RobotCalibrationBoard #StereoCameraCalibrationBoard #CalibrationBoard