Whether the measurement and recognition accuracy of industrial machine vision systems meets requirements hinges largely on calibration—approximately 80% of early-stage debugging issues stem from this step. Many R&D teams spend half a month tuning calibration parameters, only to find those parameters drift significantly when deployed into mass production. The root cause often lies in the very first step: selecting the wrong industrial camera calibration target.
Today, we’ll break down the technical characteristics of three mainstream types of industrial camera calibration targets—from the perspective of application scenario compatibility—to help you choose the right solution the first time.
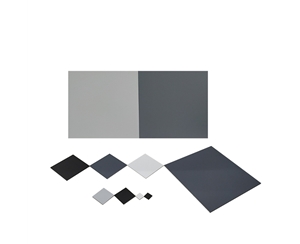
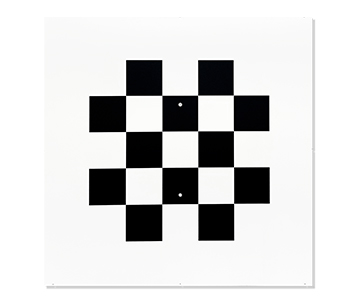
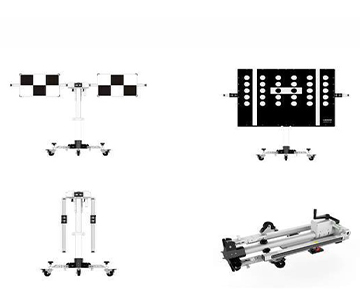
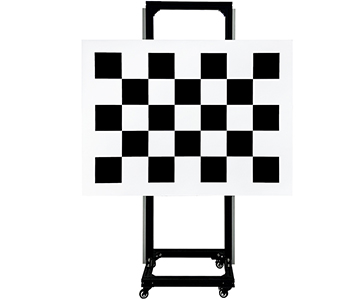
**Entry-Level General-Purpose Target: Checkerboard Calibration Target**
As the most widely adopted foundational calibration solution in the industry, its core recognition logic begins with grayscale thresholding to extract contours at black-and-white grid boundaries. Irregular noise regions are filtered out, after which sub-pixel algorithms locate feature corners at intersections of black-and-white squares. These corners exhibit relatively large positional shifts under perspective distortion or radial distortion—making them naturally suitable for high-precision calibration tasks. Moreover, recognition can be rapidly deployed using standard OpenCV frameworks, and procurement costs remain substantially lower than those of custom calibration targets.
Jingyi Optoelectronics’ GPG1200 series checkerboard calibration targets—such as the standardized 7×5 layout—are factory-calibrated to sub-pixel accuracy. Their design intentionally adopts an odd-even row/column count configuration: users need no additional dimensional verification upon receipt, and the 180° rotational ambiguity common in stereo calibration is inherently avoided.
That said, this type of calibration target has clear limitations: the entire board must fully appear within the imaging field-of-view. Consequently, distortion data from image edges cannot be captured—yet lens distortion is typically strongest near the periphery, often leading to insufficient edge-region correction accuracy.
Two practical usage details deserve attention:
1. Prefer checkerboard targets with odd-even row/column counts;
2. When capturing frontally, ensure the calibration board occupies *at least 55%* of total image pixels—this significantly reduces parameter deviation probability.
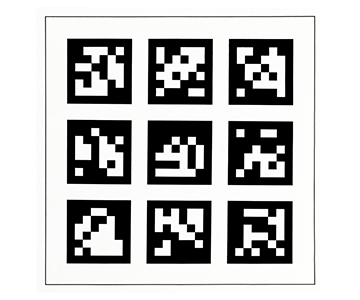
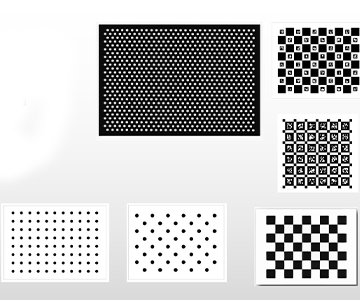
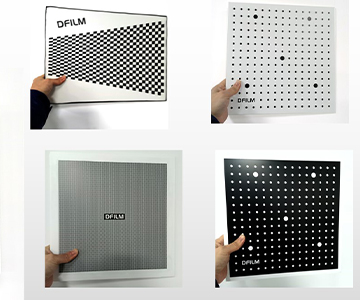
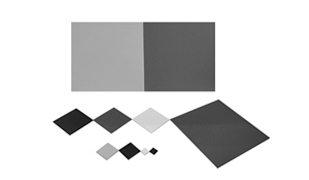
**Low-Light Scenario–Optimized Target: Circular Dot Array Calibration Target**
This target uses regularly arranged circular dots as feature spots. Recognition proceeds by applying threshold-based filtering across three dimensions—area, circularity, and convexity—to reject environmental noise, followed by feature-point matching according to the pre-defined array pattern.
Compared to checkerboards, circular dot arrays demonstrate >30% stronger resistance to ambient stray light and image grain noise—yielding superior recognition stability. Even in challenging workshop conditions (e.g., backlit setups or uneven supplemental lighting), features remain reliably extractable. Jingyi Optoelectronics’ circular dot array targets further incorporate matte coating to suppress specular reflections under intense illumination.
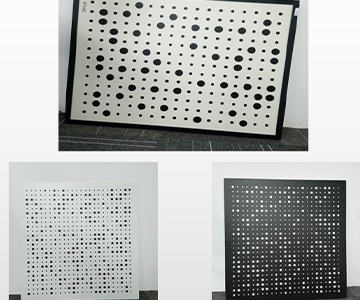
Still, minor drawbacks exist: circles project as ellipses under perspective projection. If unanticipated higher-order lens distortions are present, micron-level feature-point offsets may occur—though such errors remain negligible for typical industrial inspection applications.
When selecting, distinguish between symmetric and asymmetric dot arrays: symmetric layouts suffer from 180° rotational ambiguity during recognition; therefore, *asymmetric arrays are mandatory for stereo calibration*, whereas both types suffice for single-camera calibration. In low-light environments, their adaptability far exceeds that of standard checkerboards.
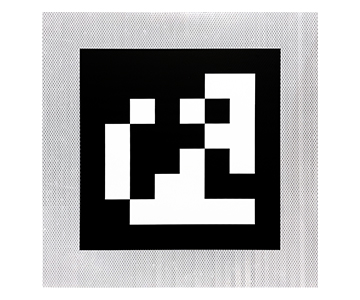
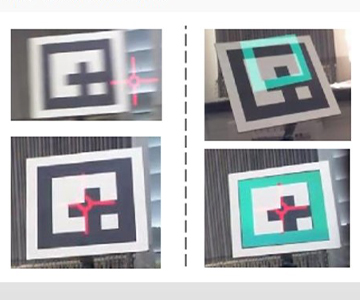
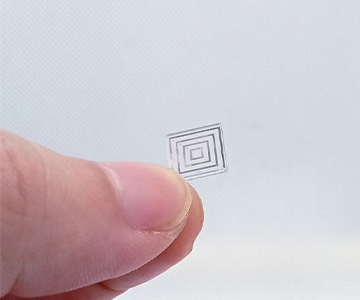
**Complex-Scenario–Optimized Target: Encoded Charuco Calibration Target**
This hybrid solution integrates checkerboard geometry with unique binary encoding in each square. Even if up to one-third of the target area is occluded—or suffers local overexposure or glare—the system can still localize the board via intact encoded squares, then perform sub-pixel refinement on detectable corners.
Its advantages directly address the weaknesses of standard checkerboards: strong occlusion tolerance and robustness against uneven illumination, extended capability to capture distortion data from image peripheries, and >40% higher distortion-correction robustness compared to conventional checkerboards. It supports monocular, binocular, and multi-camera stereo calibration—and is natively supported in OpenCV 3.0+ via the `opencv-contrib` module.
However, its unique usage barrier lies in comparatively complex algorithm deployment: correct visual library version compatibility is essential. Otherwise, recognition failures are likely. Before use, verify that your development environment runs OpenCV ≥3.0 *and* includes the `opencv-contrib` extension module.
**Quick Selection Guide**
Match your project needs directly:
- For simple monocular inspection projects with tight budgets and controlled environments, choose the **checkerboard calibration target**. Jingyi Optoelectronics’ standardized checkerboard series also offers customizable sizes and precision grades—delivering excellent cost-performance balance.
- For low-light, high-noise workshop settings requiring only monocular or non-stereo calibration, opt for the **asymmetric circular dot array calibration target**—it delivers hassle-free performance.
- For production-line scenarios involving partial occlusions, stringent distortion-correction requirements, or binocular/multi-camera stereo calibration, select the **Charuco calibration target**—it maximizes adaptation efficiency.
One final critical note: After successful calibration, *do not adjust lens focal length or aperture settings*, nor disturb the fixed relative position between lens and object. Doing so invalidates previously calibrated intrinsic parameters, requiring full recalibration. Selecting the appropriate industrial camera calibration target—combined with disciplined operational practices—enables reliable, “calibrate-once-and-done” outcomes.
#AutomationPositioningTarget #ComputerVisionCalibrationTarget #IndustrialCameraCalibrationTarget #QRCodeCalibrationTarget #VisionRecognitionCalibrationTarget #CalibrationTarget